



اموزش تصویری ساخت ربات هوشمند موشی Mousebot
حرکت هوشمندانه به سمت نور

شاید شما هم از ان دسته افرادی باشید که قصد داریدیک ربات هوشمند بسازید ولی بدلیل اطلاعات کم و نبود یک منبع خوب برای راهنمایی دچار سردرگمی شده اید و نهایتا از ساخت یک ربات هوشمند صرفه نظر کرده اید!ولی نگران نباشید در این پست از کینگ2نت قصد داریم به شما اموزش ساخت یک ربات هوشمند را بصورت کاملا تصویری و گام به گام خدمت شما همراهان گرامی اموزش دهیم.رباتی که در این پست قصد داریم خدمت شما معرفی کنیم ربات هوشمند موشی هست که این ربات بسمت نور حرکت می کند و اگر در سر راه این ربات مانعی باشد مثل دیوار،ربات بصورت خودکار مسیر خود را عوض میکند یا حتی اگر منبع نوری که ربات بدنبال ان هست اگر قطع شود،ربات مجددا شروع به چرخش میکند تا منبع نور جدیدی پیدا کند و سپس به سمت ان می رود!در ادامه این پست از کینگ2نت با ما همراه باشید تا نحوه کامل ساخت این ربات را خدمت شما همراهان گرامی اموزش دهیم.
با توجه به توضیحاتی که در مورد نحوه فعالیت این ربات خدمت شما دادم ،شاید الان فکر میکنید که برای ساخت ربات Mousebot شما نیاز به یک سری وسیله قیمتی و تخصصی دارید!خیر! ما در این اموزش برای ساخت ربات از موس های غلطکی قدیمی استفاده میکنیم که براحتی میتوانید با قیمت خیلی پایین تهیه کنید.
وسایل مورد نیاز برای ساخت ربات:
1) یک عدد موس غلطکی قدیمی
2)یک عدد کلید یک پل
3) یک عدد رله 8 پایه 5 ولت(DS2YE-S-DC5V)
4) اپاَمپ یا تقویتکنندههای عملیاتی مدل:LM386( ای سیIC)
5)یک عدد ترانزیستور مدل 3904
6)یک عدد ال ای دی(با هر رنگی)
7)یک عدد مقاومت 1 کیلو اهم و1 عدد مقاومت 10 کیلو اهم
8)یک عدد خازن 100 میکرو فاراد
9) دو عدد چرخ کوچک(می تونید از لاستیک کروی داخل کاست های قدیمی استفاده کنید)
10)دو عدد موتور کوچک(همان آرمیچر که داخل اسباب بازیها وجود داره که هزار تومان میشه)
11) دو عدد سنسور نوری (داخل موس وجود داره که در شکلهای پایین مشخص است)
12) یک عدد باطری کتابی 9 ولت
13)یک عدد فلاپی یا سی دی برای سپر
14)دو عدد سیم مفتولی رسانا(2تا 10 سانتی متر یا کمتر)
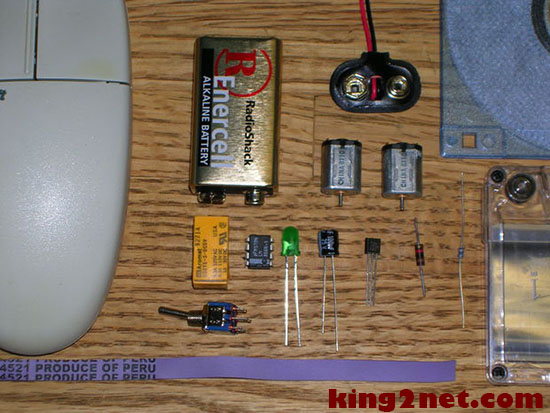
اینم یک نمای کلی از وسایل مورد نیازمان:
ابزار مورد نیاز:
چسب حرارتی
هویه
پیچ گوشتی
انبردست کوچک
سیم چین
چاقو
اره اهن بری
اموزش ساخت ربات:
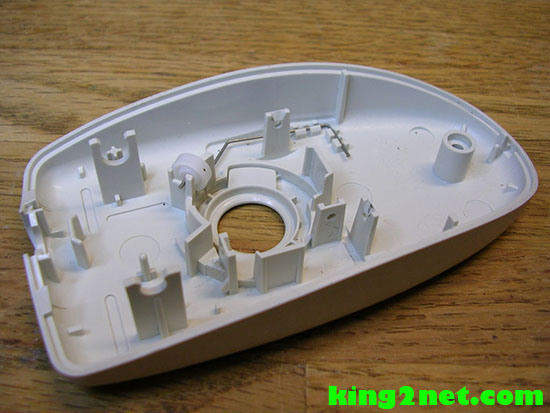
مرحله اول:ابتدا شما باید موس غلطکی را باز کنید تا وسایلی که مورد نیازمان هست را از موس بصورت صحیح و سالم خارج کنیم.
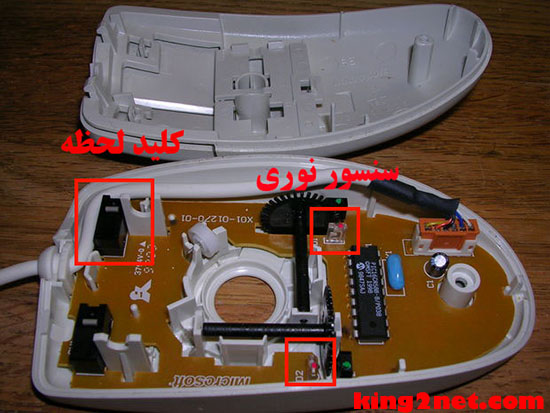
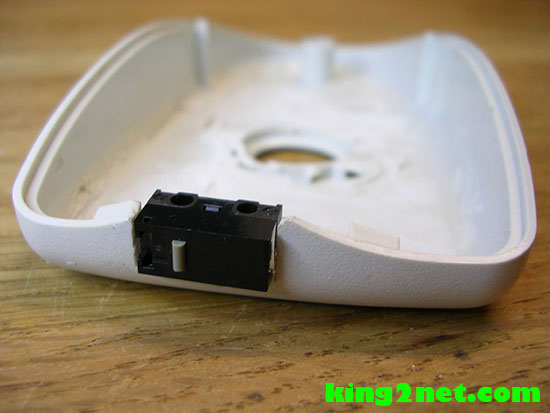
ما به دو قطعه ی درون موس نیاز داریم:سنسور نوری و کلید لحضه ای (فشاری)که در شکل زیر مشخص شده است.
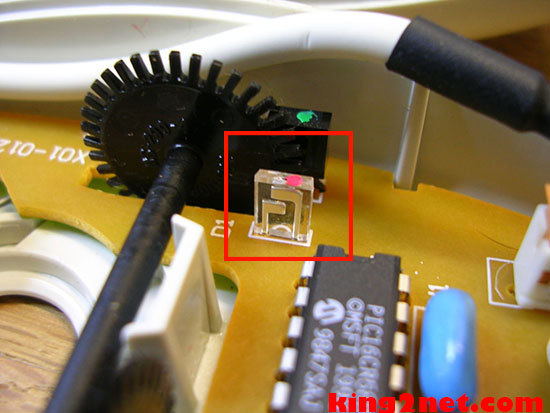
برای جدا کردن سنسور نوری:پایه اونو با هویه گرم کنید وسپس بیرون بکشید

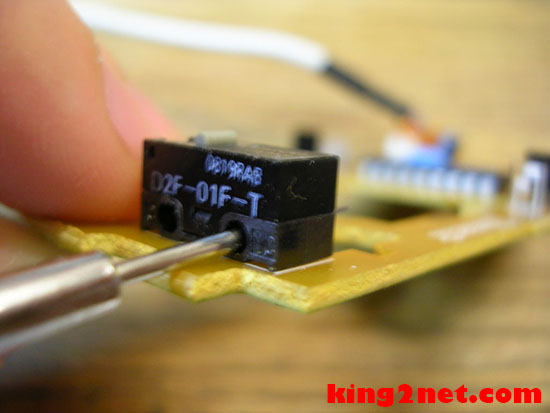
برای جدا کردن کلید لحضه ای:بوسیله پیچ گوشتی اونو باز کنید:

مرحله دوم:در این مرحله شما باید قطعات داخل موس را خارج کنید و درون ان را با چاقو یا هر وسیله دیگه تمیزکنید و دیواره جانب اونو برای قرار گیری ارمیچر برش دهید مثل شکل های زیر:
نکته:فقط محل های بستن پیچ را نبرید چون برای سوار کردن ربات به کار میاد.



مرحله سوم:در این مرحله شما باید چرخ های کوچکی که از کاست جداکرده اید را به سر ارمیچروصل کنید.همچنین باید چند لایه نوار پلاستیکی(اگر از جنس فوم باشد بهتر است) بدور این چرخ ها بپیچید تا یک اصطکاک بین چرخ و زمین ایجا شود(میتوانید از نوار چسب برق هم استفاده کنید)




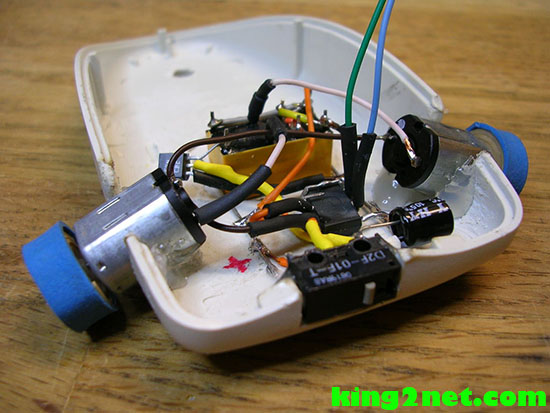
مرحله چهارم:در این مرحله شما باید رله را نصب کنید که نحوه نصب ان در حرکت ربات بسیار مهم است.شما ابتدا باید بصورت ضربدری پین8 را به 11 وپین 6 را به 9 لحیم کنید.
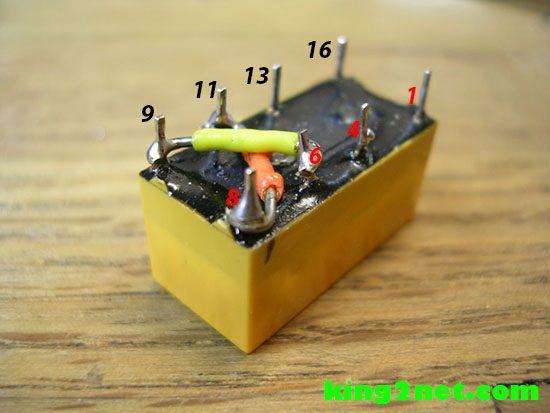
سپس پین 1 و 8 را به هم لحیم کنید.همچنین دوتا سیم بصورت جدا گانه به سر پین های 8 و 9 لحیم کنید.
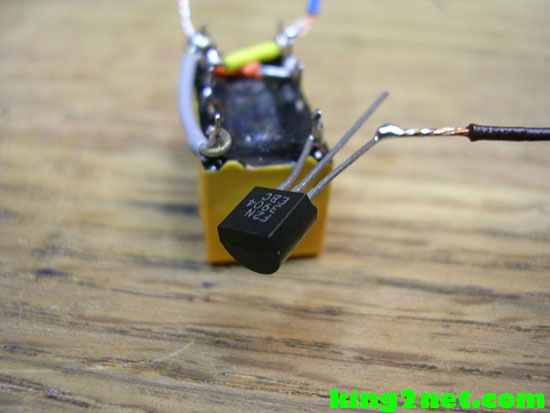
در این مرحله شما باید ترانزیستور را به رله متصل کنید که نحوه اتصال به این صورت است:همان طور که میبیند ترانزیستور 2تا سطح داره که یک صاف هست و یکی مقعر(کوژ) شما باید سمت صاف ترانزیستور را به سمت خودتون بگیرید تا بتونید منظورم را در پایه سمت چپ و راست درک کنید.خوب شما باید پایه سمت راست ترانزیستور را به پین 16 رله لحیم کنیدو پایه چپ ترانزیستور را بوسیله یک کمی سیم به پین 9 رله لحیم کنید
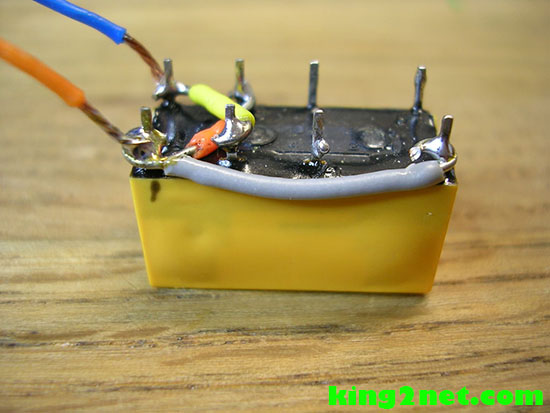
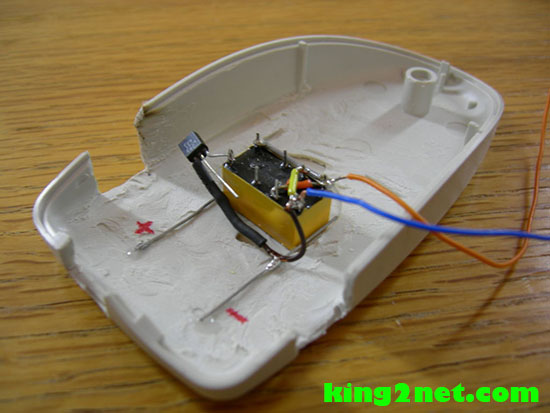
همچنین شما باید دوتا سیم مفتولی در دو طرف رله قرار بدهیدو همانندشکل زیر مثبت و منفی اونو مشخص کنید.حالا شما باید سیمی که پایه چپ ترانزیستور را به پین 9رله وصل میکند را به سیم مفتولی منفی لحیم کنید.و همچنین سیمی که به پین 8 رله لحیم کرده بودید (سیم نارنجی رنگ)را به مفتول مثبت لحیم کنید.
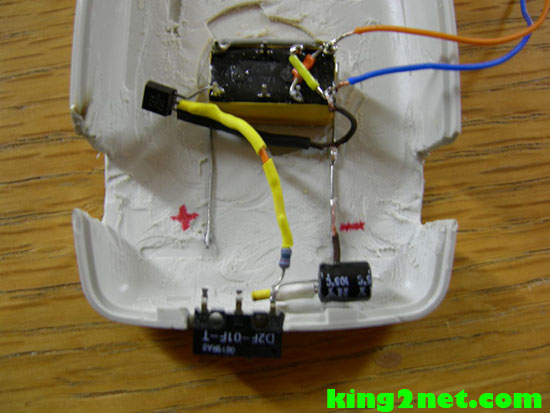
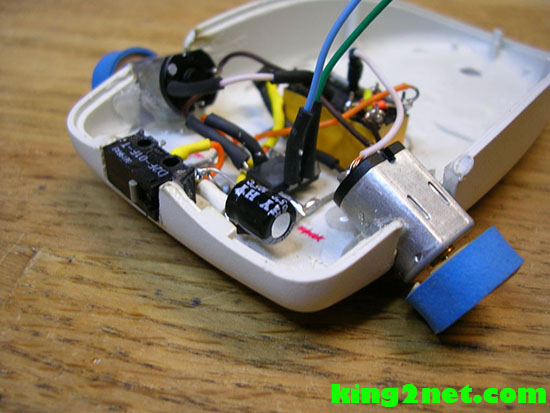
مرحله پنجم:در این مرحله شما باید سر مثبت خازن و یکی از سرهای مقاومت 10کیلو اهمی را به پین open(باز) کلید لحظه ای لحیم کنید.(برای تشخیص پین باز کلید لحظه ای از پین بسته ، میتونید از مولتی متر استفاده کنید)

در این مرحله سر دیگر مقاومت 10کیلو اهمی را بوسیله سیم به پایه وسط ترانزیستور لحیم کنید.همچنین سر منفی خازن زا هم به سیم مفتولی منفی لحیم میکنیم.
همچنین پین وسطی کلید لحظه ای رو هم به سیم مفتولی مثبت لحیم میکنیم.
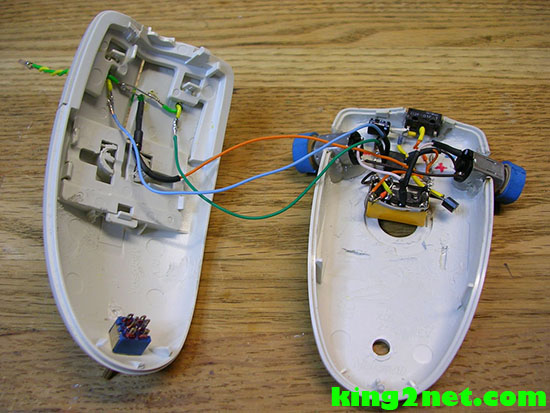
مرحله ششم(مرحله نصب مغز ربات):ابتدا شما باید پین های شماره 1 و 8 اپ امپ LM386 را به هم لحیم کنید.
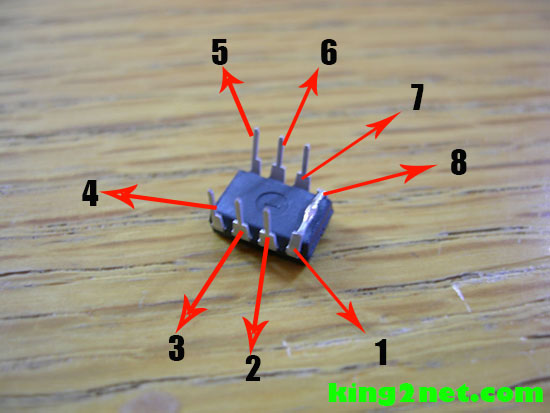
حال پین شماره 4 اپ امپ LM386 را به سیم مفتولی منفی و پین شماره 6 اپ امپ LM386 را به سیم مفتولی مثبت لحیم کنید.همچنین به پین های شماره 2، 3 و 5 اپ امپ LM386 سه قطعه سیم بصورت جداگانه متصل کنید و فعلا رهاش کنید.

مرحله هفتم:در این مرحله باید سه سوراخ بروی قسمت درب جلوی موس ایجاد کنیدتا بتوانیم یک ال ای دی و دو سنسور نوری را نصب کنید.همچنین یک سوراخ هم در قسمت انتهایی درب موس برای نصب کلید یک پل ایجاد میکنیم.


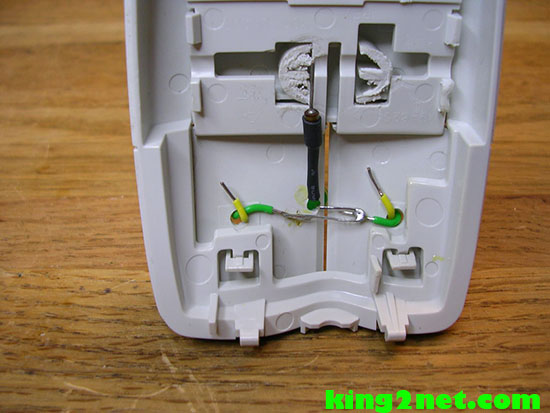
ما باید هر دو سیم پایه های سنسورهای نوری را به هم بپیچانیم مطابق شکل:

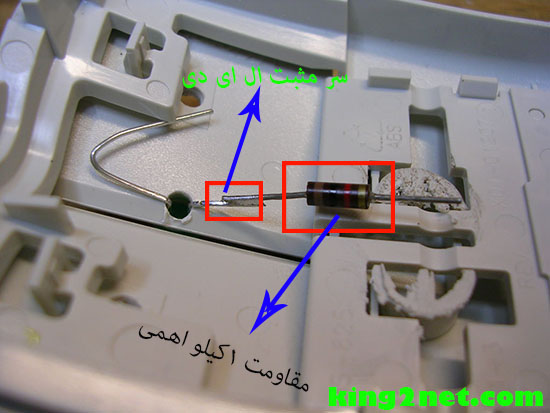
ال ای دی را وارد سوراخ وسطی میکنیم و پایه مثبت اونو به یکی از سرهای مقاومت 1کیلواهمی لحیم میکنیم.
سنسورهای نوری را درون سوراخ مربوط قرار میدیم و سر های منفی هر دو سنسور نوری را به سر منفی ال ای دی لحیم میکنیم(برای تشخیص سر منفی سنسور حرکتی از مولتی متر و دیود استفاده میکنیم)

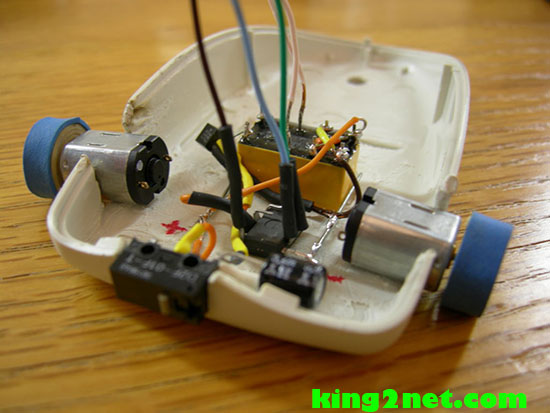
مرحله هشتم:در این مرحله ما هر دوتا آرمیچر رابا زاویه مناسب و با استفاده از چسب حرارتی بروی موس نصب میکنیم.دقت کنید که زاویه هر دو آرمیچر نسب به هم و زمین یکسان باشه.
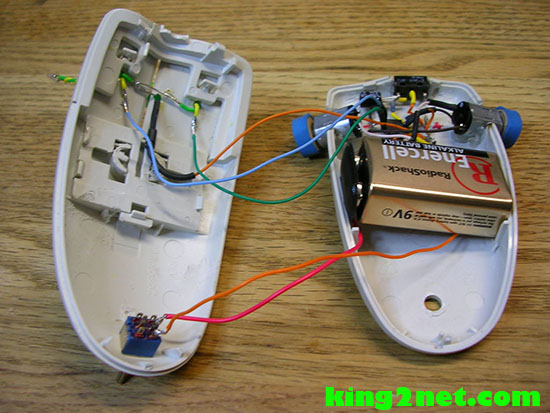
مرحله اخر:در این مرحله شما باید پین 13 رله را به ارمیچر سمت چپ و پین 4 رله را به موتور سمت راست وصل کنیدو سپس سیمی که به پین شماره 5 اپ امپ LM386 لحیم کرده اید (که در شکل زیر قهوه ای است) را به پین هر دو ارمیچر که بدون اتصال هست،متصل کنید.نحوه چرخش موتورها به این صورت است که ارمیچر سمت راست باید در جهت عقربه ساعت و ارمیچر سمت چپ در خلاف عقربه ساعت بچرخد.(اگر برعکس بود باید مثبت منفی باتری را عوش کنید تا مشکل حل شود)
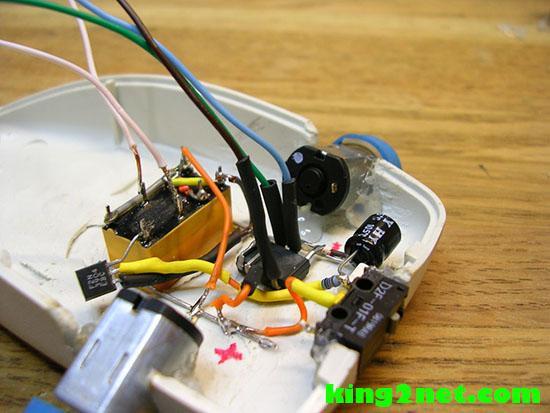
در این مرحله پین شماره 2 اپاَمپ(سیم سبز رنگ) را به سر مثبت سنسور نوری سمت چپ و پین شماره 3 اپاَمپ(سیم ابی رنگ) را به سر مثبت سنسور نور سمت راست لحیم میکنیم.همچنین سر دیگر مقاومت 1 کیلو اهمی را به سیم مفتولی مثبت متصل میکنیم.
در این مرحله شما باید باتری کتابی را نصب کنید همان طور که مشاهده میکنید دو سیم از باتری خارج می شود یکی قرمز(متصل به قطب منقی باتری) و دیگری سیاه (متصل به قطب مثبت باتری)هست.شما باید سیم سیاه را به سیم مفتولی مثبت لحیم کنید.و سیم قرمز را به یکی از پین های کلید تک پل لحیم کنید و سپس یک سیم بین پین دیگر کلید تک پل و سیم مفتولی منفی لحیم کنید.
همانند شکل زیر دو قطعه موس را بروی هم قرار دهید و اگر جا پیچی های ان هنوز سالم هست ببندید و اگر نیست با چسب بصورت ظریف بچسبانید.

و در نهایت شما باید یک باریکه ای از سی دی یا روکش دیسک فلاپی را مطابق شکل زیر برش دهید و سپس این نوار باریک را باید بوسیله چسب حرارتی در یک سمت جلو موس و دقیق روبه رو کلید لحظه قرار دهید بطوری که بیشترین فشار را بروی کلید بیاورد تا کلید پس از دریافت کمترین ضربه عملکند(دقت کنید نباید هنگام چسباندن این نوار کلید پایین بروی بلکه باید بروی اون باشد تا پس از برخورد به موانع سریع عمل کند)

تمام!
دوستان عزیز در صورتی که مشکلی در ساخت این ربات داشتید در قسمت دیدگاه همین مطلب بیان کنید.همچنین در صورتی که موفق به ساخت ربات شدید عکس یا فیلم ان را هم قرار دهید تا دوستان استفاده کنند.
این اموزش بصورت اختصاصی قرار گرفته شده است. لطفا در صورتی که از این اموزش در وبسایت خود استفاده میکنید منبع این پست (king2net.com)را هم درج کنید.
پست های مرتبط با این اموزش:





")
عالی بود فقط غلط املایی داشت و آدم گیج می شد اگه می شه ویرایش اش کنید
ممنون
در کدام قسمت این غلط املایی مشاهده کردید؟!